کنترل سرعت موتور سنکرون:
موتورهای سنکرون، سرعت ثابتی دارند. این موتورها در سرعت سنکرون منبع کار می کنند و معمولاً برای عملکرد با سرعت ثابت و تحت شرایط بی باری، به منظور بهبود ضریب توان به کار می روند.

موتورهای سنکرون تلفات کمتری نسبت به موتورهای القایی دارند.
سرعت یک موتور سنکرون برابر است با:

که در آن، f فرکانس منبع وp تعداد قطب های موتور است.
همان طور که از فرمول اخیر مشخص است، سرعت سنکرون به فرکانس منبع و تعداد قطب های روتور وابسته است.
تغییر تعداد قطب ها کار آسانی نیست. بنابراین، از این روش استفاده نمی کنیم. البته با استفاده از مدارهای شامل قطعات حالت جامد، فرکانس جریان تغذیه کننده موتور سنکرون را می توان تغییر داد.
بنابراین، می توانیم سرعت موتور سنکرون را با تغییر فرکانس منبع کنترل کنیم. برای این کار می توان از ترکیب یکسوکننده ها و اینورترها به دو صورت حلقه باز و حلقه بسته استفاده کرد.
روش حلقه باز:
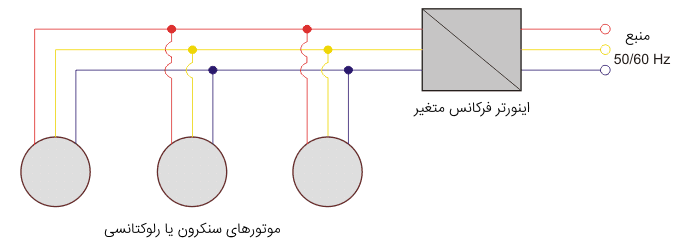
در این روش، موتور سنکرون از یک اینورتر فرکانس متغیر تغذیه می شود. به دلیل ساختار حلقه باز، اینورتر اطلاعاتی درباره وضعیت روتور ندارد. این روش برای مواردی که کنترل سرعت بسیار دقیق مورد نظر نیست، کاربرد دارد. منبع، مجموعه اینورتر-یکسوساز را تغذیه می کند.
در شکل زیر، نمودار بلوکی کنترل سرعت موتور سنکرون نشان داده شده است. ولتاژ سه فاز منبع، از طریق یکسوساز به ولتاژ DC تبدیل می شود.
پس از آن، ولتاژ DC دارای ریپل از طریق فیلتر LC نرم شده و هموار می شود. این ولتاژ DC نرم، به اینورتر وارد شده و اینورتر موتور را تغذیه می کند. اینورتر می تواند منبع جریان یا منبع ولتاژ باشد.

وقتی بخواهیم چند موتور در سرعت یکسانی کار کنند، استفاده از روش حلقه باز مفید خواهد بود. از معایب این روش می توان به نوسان یا تغییرات ناگهانی اشاره کرد.
روش حلقه بسته:
هنگامی از روش حلقه بسته استفاده می کنیم که دقت بالایی در کنترل سرعت لازم باشد. در این روش، سرعت روتور، فرکانس خروجی اینورتر را تعیین می کند.
همان طور که در شکل زیر می بینیم، سرعت روتور به یک تفریق کننده پس خورانده می شود. اختلاف بین سرعتِ از قبل تنظیم شده و سرعتِ واقعی به یکسوساز وارد می شود. بر این اساس، اینورتر فرکانس را تغییر داده و سرعت موتور را تنظیم می کند.
در این حالت، کنترل سرعت دقیق تری داریم. برای مثال، اگر سرعت کاهش یابد (به دلیل افزایش بار)، فرکانس منبع تغذیه استاتور کم می شود و به همین دلیل، روتور با میدان مغناطیسی استاتور سنکرون می ماند. در این حالت، نوسان یا تغییر ناگهانی وجود نخواهد داشت.












