خانه
اپلیکیشن زینگ
آشنایی و همکاری
سامانه صادرات و واردات
فروشگاه
خدمات اطلاعاتی
اخبار و مقالات
تماس با ما


جایابی قطب در فضای حالت:

سیستم تک ورودی شکل 1 را با خروجی y=1x در نظر می گیریم (فرض می کنیمC=1است):

قانون کنترل فیدبک را به صورت زیر معرفی می کنیم:

با اعمال فیدبک، سیستم حلقه بسته به صورت زیر در خواهد آمد:

همان طور که می بینیم، با افزودن فیدبک، ماتریس A به A−BK تبدیل شده است. اکنون مطابق شکل 3، سیستم حلقه باز را با فیدبک K و مرجع r کامل می کنیم. در نتیجه، تابع تبدیل حلقه بسته  به صورت زیر قابل محاسبه است:
به صورت زیر قابل محاسبه است:

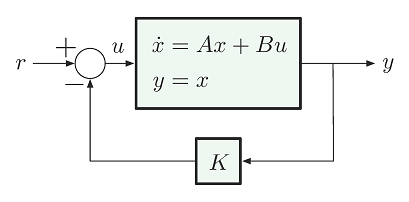
شکل 3: فیدبک حالتKسیستم(A,B,I,0) را با مرجعr کامل می کند.
با اعمال تبدیل لاپلاس به رابطه (1)، داریم:

قطب های حلقه بسته، همان مقادیر ویژه ماتریس A−BK هستند. در نتیجه، با یافتن فیدبکK مناسب می توان قطب های سیستم حلقه بسته را به سادگی جایابی کرد.






|
|

|

|
| نماد اعتماد الکترونیک | نشان ملی ثبت | گواهی شامد ارشاد |
![]()
![]()
![]()
![]()
![]()
![]()
© کلیه حقوق مادی و معنوی این وب سایت متعلق به داده پردازان هومان پویان می باشد.

