کنترل خودکار در کنترل کننده PID:
برای خلاص شدن اپراتور از کار خسته کننده کنترل دستی، باید حلقه کنترل را خودکار کنیم. این کار به صورت زیر قابل انجام است:

- نصب یک دستگاه اندازه گیری دمای الکترونیکی.
- خودکار کردن شیر گاز با اضافه کردن یک محرک یا فعال گر (و شاید یک گیره تنظیم وضعیت).
- تعبیه یک کنترل کننده (مثلاً PID) و اتصال آن به یک دستگاه اندازه گیری دمای الکترونیکی و شیر کنترل خودکار.
کنترل کننده تناسبی-انتگرالی-مشتقی (Proportional-Integral-Derivative Controller) یک نقطه تنظیم (Set Point) یا SP دارد که اپراتور می تواند آن را روی دمای مطلوب تنظیم کند.
خروجی کنترل کننده (Controller’s Output) یا CO موقعیت شیر کنترل را تنظیم می کند. و در نهایت، دستگاه اندازه گیری دما، که متغیر فرایند (Process Variable) یا PV نامیده می شود، فیدبک لازم را به کنترل کننده می دهد.
متغیر فرایند و خروجی کنترل کننده معمولاً با سیگنال های 4 تا 20 میلی آمپری یا فرمان های دیجیتال روی یک فیلدباس منتقل می شوند.

شکل 2: چند کنترل کننده PID
وقتی همه اجزا در جای خود قرار گیرند، کنترل کننده PID متغیر فرایند را با نقطه تنظیم مقایسه کرده و اختلاف بین دو سیگنال را محاسبه می کند که خطا (Error) یا E نامیده می شود.
سپس، بر اساس خطا و ثابت های تنظیم کنترل کننده PID، کنترل کننده یک خروجی مناسب را محاسبه کرده و برای نگه داشتن دما در نقطه تنظیم، شیر را می چرخاند.
اگر لازم باشد دما به بالاتر از مقدار نقطه تنظیم تغییر کند، کنترل کننده موقعیت شیر را در جهت عکس تغییر می دهد و بالعکس.
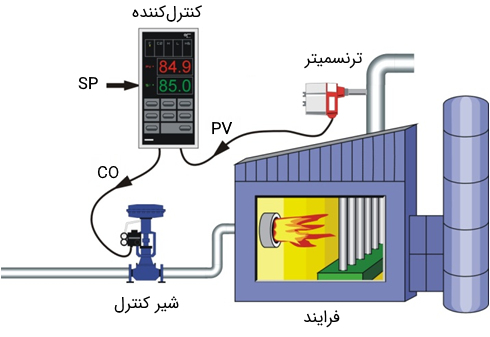
شکل 3: یک کنترل کننده PID که کنترل خودکار را انجام می دهد.











