کنترل دستی در کنترل کننده PID:
کنترل کننده PID یا تناسبی-انتگرالی-مشتقی، یک الگوریتم و روش کنترل حلقه بسته با بهره گیری از مفهوم فیدبک است که در بسیاری از فرایندهای صنعتی برای کنترل سرعت موتورهای DC، کنترل فشار، کنترل دما و… به کار می رود.

بدون کنترل کننده های خودکار، تنظیمات فرایندها را باید به صورت دستی انجام داد. برای مثال، برای ثابت نگه داشتن دمای آب تخلیه شده از یک گرم کن گازی صنعتی، اپراتور دماسنج را مشاهده و شیر گاز را بر اساس آن تنظیم می کند (شکل 1).
اگر به دلایلی دمای آب بسیار زیاد شود، اپراتور مجبور می شود شیر گاز را تا جایی کم کند که دما به حالت مطلوب قبلی برسد. اگر آب خیلی سرد شود، اپراتور شیر گاز را باز می کند.
این کنترل دستی یک فرم بسیار ساده از کنترل است که منجر به نوسان در متغیر فرایند می شود. نوسان می تواند بر کیفیت محصول خروجی تأثیر منفی داشته باشد که نامطلوب است.
یک روش کنترلی جایگزین، استفاده از کنترلی خودکار است که کنترل PID نامیده می شود. در ادامه، این روش کنترلی را توضیح می دهیم.
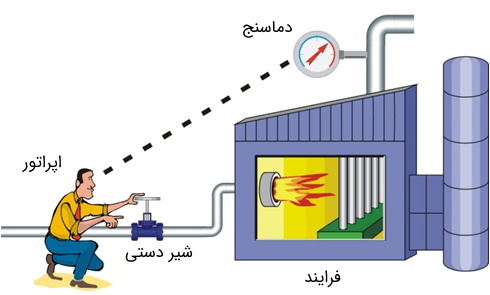
شکل 1: یک اپراتور در حال کنترل دستی
کنترل فیدبک:
وظیفه کنترلی که اپراتور انجام می دهد، کنترل فیدبک یا بازخورد (Feedback Control) نامیده می شود، زیرا اپراتور میزان آتش را بر اساس فیدبک یا بازخوردی تغییر می دهد که توسط دماسنج از فرایند دریافت کرده (دیده) است.
حلقه کنترل:
اپراتور، شیر گاز، فرایند و دماسنج یک حلقه کنترل را تشکیل می دهند. هر تغییری که اپراتور به شیر گاز اعمال می کند، روی دمای آب تأثیر می گذارد و همین تغییر به اپراتور بازخورد می شود. در نتیجه، حلقه بسته می شود.











