خانه
اپلیکیشن زینگ
آشنایی و همکاری
سامانه صادرات و واردات
فروشگاه
خدمات اطلاعاتی
اخبار و مقالات
تماس با ما


معادله گشتاور موتور رلوکتانسی:
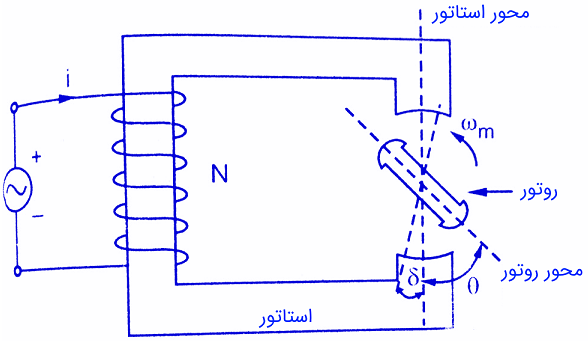
موتور رلوکتانسی ساده و ابتدایی شکل زیر را در نظر بگیرید. تغییر رلوکتانس سیم پیچ ها نسبت به موقعیت روتور سینوسی است.
تغییر اندوکتانس نسبت به زاویهθ دو برابر فرکانس است و با معادله زیر بیان می شود:

سیم پیچی استاتور با منبع AC تحریک می شود. در نتیجه، جریان آن برابر است با:

انرژی ذخیره شده تابعی از اندوکتانس است و به صورت زیر است:

شار پیوندی نیز برابر است با:

گشتاور نیز به صورت زیر بیان می شود:

با جایگذاری مقادیر i و L در معادله بالا، داریم:

اگر روتور با سرعت زاویه ای ωm در حال چرخش باشد، معادله گشتاور را می توان بر حسب ω و ω m به صورت زیر نوشت:

که در آن، θ=ωmt-δ و δموقعیت روتور در t=0 است.
معادله بالا، گشتاور لحظه ای تولیدی را نشان می دهد. گشتاور میانگین برابر با صفر است، زیرا میانگین هر عبارت معادله بالا صفر است. وقتی ω=ωm باشد، مقدار گشتاور صفر نیست و در این شرایط، اندازه گشتاور میانگین برابر است با:

سرعت متناظر با فرکانس ω=ωm چیزی جز سرعت سنکرون نیست. زاویه δ یک زاویه گشتاور است. حداکثر گشتاور در δ=45∘ رخ می دهد که زاویه Pull-Out نامیده می شود.
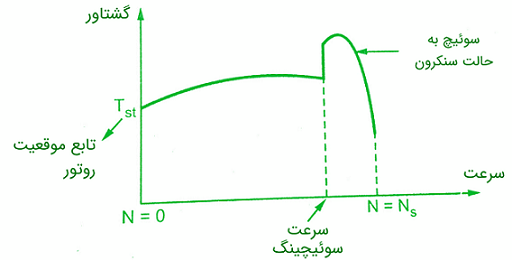
مشخصه گشتاور-سرعت موتور رلوکتانسی:
مشخصه گشتاور-سرعت موتور رلوکتانسی در شکل زیر نشان داده شده است. همان طور که می بینیم، گشتاور راه اندازی شدیداً وابسته به موقعیت روتور است.
مزایا، معایب و کاربردهای موتور رلوکتانسی:
موتور رلوکتانسی دارای مزایای زیر است:
معایب موتور رلوکتانسی نیز به شرح زیر است:
برخی از کاربردهای موتور رلوکتانسی عبارتند از:






|
|

|

|
| نماد اعتماد الکترونیک | نشان ملی ثبت | گواهی شامد ارشاد |
![]()
![]()
![]()
![]()
![]()
![]()
© کلیه حقوق مادی و معنوی این وب سایت متعلق به داده پردازان هومان پویان می باشد.

