انواع موتورهای پله ای:
سه نوع موتور پله ای وجود دارد که در این بخش آن ها را معرفی می کنیم.

موتور پله ای مغناطیس دائم:
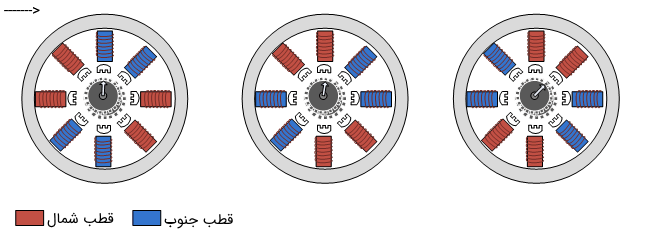
زاویه پله معمولی یک موتور پله ای با آهنربای مغناطیس دائم 7٫5 تا 15 درجه است. شفت آهنی روتور با تغییر قطب شمال و جنوب در یک خط مستقیم موازی آهنی مغناطیسی می شود که نتیجه آن افزایش شدت شار مغناطیسی است و به همین دلیل گشتاور این نوع موتورها به طور قابل توجهی افزایش می یابد.
موتورهای پله ای آهنربای دائم به دلیل مقادیر بالاتر زاویه های پله، رزولوشن یا دقت و نرمی پایین تری دارند. البته این موتورها، موتورهای کم هزینه ای هستند.
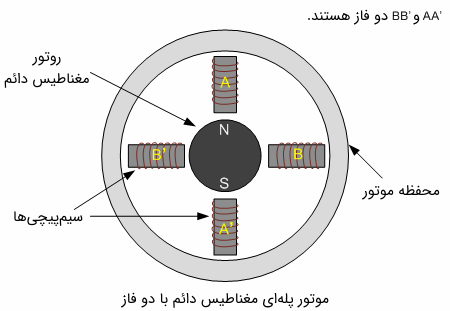
شکل زیر، عملکرد موتور پله ای مغناطیس دائم را نشان می دهد.

نرمی چرخش یک موتور پله ای مغناطیس دائم را می توان با افزایش تعداد قطب ها در روتور یا تعداد فازها بهبود داد.
موتور پله ای رلوکتانس متغیر:
موتورهای پله ای رلوکتانس متغیر از اولین موتورهای پله ای هستند و استفاده از آن ها امروزه متداول نیست.
در این نوع موتورها، روتور از روتور چرخ دنده ای ساخته شده از آهن نرم تشکیل شده است و هنگامی که سیم پیچ استاتور حول روتور با منبع DC تغذیه می شود، دندانه های روتور به سمت قطب های استاتور مغناطیسی جذب می شوند و بدین ترتیب چرخش صورت می گیرد.
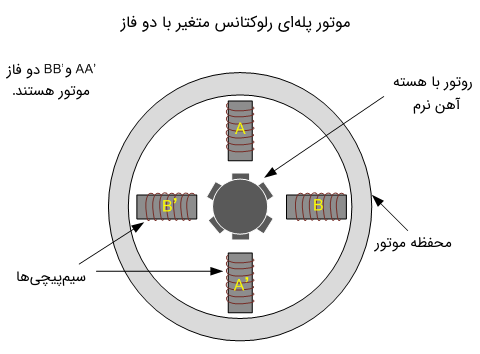
شکل زیر، عملکرد موتور پله ای رلوکتانس متغیر را نشان می دهد.

دندانه های روتور به گونه ای طراحی شده اند که وقتی یکی از آن ها در راستای یک فاز باشد، دندانه دیگر با آن هم راستا نیست. نرمی این موتور را می توان با افزایش تعداد دندانه ها و افزایش فازها بهبود داد.
موتور پله ای ترکیبی یا هیبرید:
این نوع موتور، ترکیبی از موتور پله ای مغناطیس دائم و موتور پله ای رلوکتانس متغیر است.
از آنجایی که زاویه های پله معمولی یک موتور پله ترکیبی از 3٫6 درجه تا 0٫9 درجه متغیر است، عملکرد موتور، گشتاور و مشخصه های سرعت این نوع موتورها در مقایسه با موتور پله ای آهنربای دائم بهتر است.
روتور این موتورها مانند موتور رلوکتانس متغیر است. آهنربا به صورت محوری مغناطیسی شده و به صورت متحدالمرکز در اطراف آن شار به وجود می آورد.
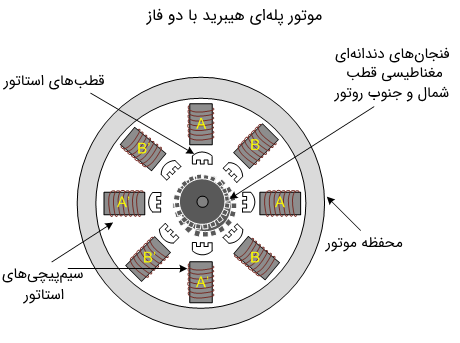
روتور مغناطیسی دو بخش دارد: یکی برای قطب شمال و دیگری برای قطب جنوب. شکل زیر این دو بخش را نشان می دهد.
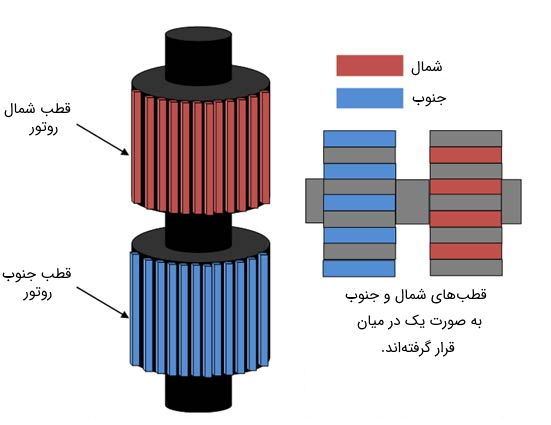
روتور موتور پله ای هیبریدی با قاعده ای مشابه انرژی دار شدن سیم پیچی استاتور می چرخد.