کنترل سنسوری موتور BLDC:
در حالت کلی، کنترل موتور BLDC به دو دسته سنسوری و بدون سنسور (Sensorless) تقسیم می شوند.

در کنترل سنسوری برای اندازه گیری موقعیت روتور از سنسورهای اثر هال تعبیه شده در استاتور استفاده می شود که موقعیت نسبی را اندازه می گیرند.
سنسورهای اثر هال در بازه های برابری (معمولا 60 یا 120 درجه الکتریکی) چیده شده اند.
در کنترل سنسوری، از ترکیب سنسور اثر هال با ترانزیستورهای قدرت استفاده می شود که به عنوان کلید الکترونیکی مورد استفاده قرار می گیرند.
سنسور اثر هال یک سیگنال منطقی صفر یا یک تولید می کند (زمانی که قطب شمال مغناطیسی در برابر آن قرار گیرد، سطح یک منطقی را نشان می دهد).
توالی کموتاسیون توسط ترکیب سیگنال های منطقی سنسور اثر هال و کلیدهای ترانزیستوری تولید می شود.
در شکل زیر توالی کموتاسیون در یک موتور BLDC سه فاز به تصویر کشیده شده است. سنسورهای اثر هال در موقعیت b، a و c نصب شده اند.
برای هر گام در توالی کموتاسیون، یکی از سیم پیچ ها (U یا V یا W) توسط پل ترانزیستوری ماسفت (MOSFET) یا به منبع ولتاژ (high) یا به زمین (low) متصل می شود و یا اتصالی ندارد (float). برای مثال در شکل سمت چپ در ردیف اول V، U و W به ترتیب float، low، high هستند.
نیروی مغناطیسی حاصل باعث چرخش موتور در جهت پادساعتگرد خواهد شد. ادامه این توالی سبب چرخش موتور و کامل شدن چرخش آن به اندازه نیم دور مکانیکی خواهد شد.

در تصویر زیر وضعیت سیم پیچ های هر فاز متناظر با سیگنال های سنسورهای اثر هال نشان داده شده است.
به این نکته توجه کنید که چگونه هر 60 درجه الکتریکی حداقل یک کلید منطقی و سیم پیچ تغییر وضعیت می دهند.
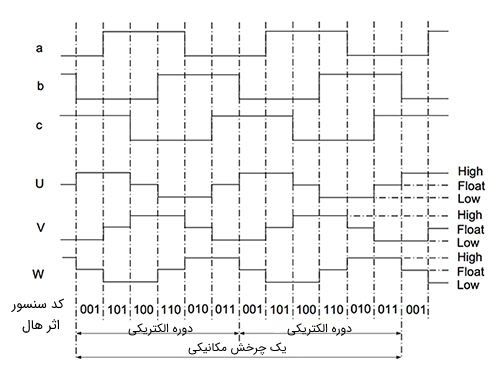
وضعیت سیگنال های خروجی کلیدهای منطقی سنسور اثر هال و سیم پیچ های هر فاز در توالی کموتاسیون











