خانه
اپلیکیشن زینگ
آشنایی و همکاری
سامانه صادرات و واردات
فروشگاه
خدمات اطلاعاتی
اخبار و مقالات
تماس با ما


اصول عملکرد موتور DC:
اگر انرژی الکتریکی به یک هادی اعمال شود که عمود بر یک میدان مغناطیسی قرار دارد، برهم کنش جریان گذرنده از هادی و میدان مغناطیسی منجر به تولید نیروی مکانیکی (و در نتیجه، انرژی مکانیکی) خواهد شد.

دو شرط لازم برای تولید نیرو روی هادی وجود دارد: هادی باید حامل جریان بوده و همچنین در یک میدان مغناطیسی باشد.
وقتی این دو شرط وجود داشته باشند، نیرویی به هادی اعمال خواهد شد که تلاش می کند آن را در جهت عمود بر میدان مغناطیسی حرکت دهد. این دقیقاً همان اصل اساسی عملکرد یک موتور DC است.
بنابراین، می توان گفت که اندازه نیروی اعمالی بر هادی به صورت زیر است:

که در آن، →B چگالی شار میدان مغناطیسی، lطول هادی و→i جریان گذرنده از هادی است. جهت حرکت هادی را می توان با استفاده از قانون دست چپ فلمینگ تعیین کرد.
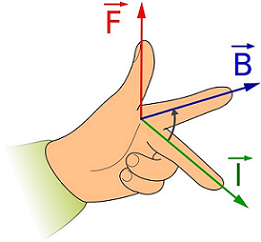
شکل 1: قانون دست چپ فلمینگ
در شکل بالا، انگشت اشاره جهت میدان مغناطیسی را نشان می دهد که از قطب شمال به قطب جنوب است.
انگشت وسط جهت جریان گذرنده از هادی را نشان می دهد. انگشت شست نیز جهت حرکت هادی را مشخص می کند.
یک پیچه یا کلاف را در نظر بگیرید که در یک میدان مغناطیسی با چگالی شارB قرار دارد (شکل 2). وقتی دو انتهای پیچه به یک منبع ولتاژ DC متصل شوند، جریانI از آن عبور خواهد کرد.
در نتیجه برهم کنش میدان مغناطیسی و جریان الکتریکی، نیرویی به پیچه اعمال خواهد شد. این نیرو به گونه ای است که موجب حرکت پیچه می شود.
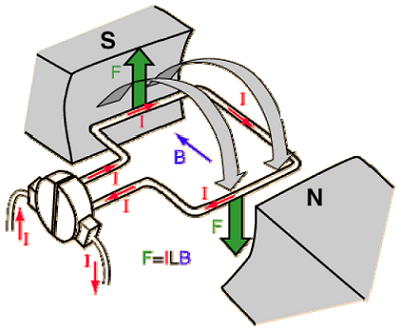
شکل 2: تولید گشتاور در یک موتور DC
در یک موتور DC واقعی، چندین پیچه مشابه این پیچه به دور روتور پیچانده می شود که بر همه آن ها نیرو اعمال می گردد. هرچه جریان هادی یا میدان مغناطیسی بزرگ تر باشند، سرعت چرخش بیشتر خواهد بود، زیرا نیروی بیشتری ایجاد می شود.
همزمان با اینکه گشتاور تولید می شود، هادی ها در یک میدان مغناطیسی حرکت می کنند. در موقعیت های مختلف، شار تغییر می کند و سبب القای یک نیروی محرکه الکتریکی (EMF) می شود (e=dϕ/dt) که در شکل 3 نشان داده شده است.
این ولتاژ با ولتاژی که سبب عبور جریان از هادی می شود مخالفت می کند و به عنوان ولتاژ مخالف یا معکوس یا نیروی ضد محرکه الکتریکی (Back EMF) شناخته می شود.

شکل 3: ولتاژ القایی در سیم پیچی آرمیچر یک موتور DC
مقدار جریان گذرنده از آرمیچر به اختلاف بین ولتاژ اعمالی و این ولتاژ مخالف بستگی دارد.
جریان حاصل از این ولتاژ مخالف، مطابق قانون لنز، با عامل ایجاد خودش مخالفت می کند و در نتیجه، سبب کند شدن ماشین می شود.
در نهایت، روتور به اندازه ای کند می شود که نیروی ایجاد شده توسط میدان مغناطیسی برابر با نیروی اعمالی به بار شفت شود. در نتیجه، سیستم با سرعت ثابت حرکت خواهد کرد.






|
|

|

|
| نماد اعتماد الکترونیک | نشان ملی ثبت | گواهی شامد ارشاد |
![]()
![]()
![]()
![]()
![]()
![]()
© کلیه حقوق مادی و معنوی این وب سایت متعلق به داده پردازان هومان پویان می باشد.

