خانه
اپلیکیشن زینگ
آشنایی و همکاری
سامانه صادرات و واردات
فروشگاه
خدمات اطلاعاتی
اخبار و مقالات
تماس با ما


ساختار و کنترل موتور پله ای:
در تصویر زیر، شماتیکی از یک موتور پله ای رلوکتانس متغیر نشان داده شده است.
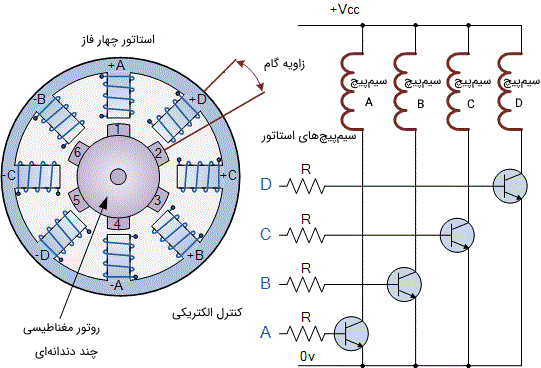
موتور شکل بالا، از یک روتور مرکزی تشکیل شده است که توسط 4 سیم پیچی میدان الکترومغناطیسی A و B و C و D محاصره شده است.
تمام سیم پیچ ها با حروف یکسان، به یکدیگر متصل شده اند تا بتوانند باعث تحریک در موتور شوند. مثلا سیم پیچ A باعث می شود که روتور مغناطیسی شده، خود را در راستای سیم پیچ A تنظیم کند.
با اعمال توان به صورت ترتیبی به هر مجموعه از سیم پیچ ها، می توان روتور را به صورت پله ای از یک موقعیت به موقعیت دیگر به چرخش در آورد و این چرخش در زاویه معینی انجام می شود که توسط ساختار موتور پله ای تعیین خواهد شد.
از طریق تحریک سیم پیچ ها به ترتیب، می توان موتور را در یک حرکت پیوسته به چرخش در آورد.
درایو موتور پله ای، هم سرعت موتور و هم زاویه هر پله را از طریق ترتیب تحریک سیم پیچ های میدان کنترل می کند.
به عنوان مثال، با تحریک سیم پیچ های میدان به صورت دنباله ADCB، موتور در جهت رو به جلو شروع به چرخش می کند و اگر دنباله تحریک به ABCD تغییر یابد، آن گاه موتور به صورت معکوس خواهد چرخید.
در مثال ساده بالا، موتور پله ای دارای چهار سیم پیچ است و به همین دلیل یک موتور 4 فاز به حساب می آید.
در نتیجه، تعداد قطب های استاتور برابر با هشت (2*4) است که در بازه های 45 درجه ای قرار گرفته اند. همچنین، تعداد دندانه ها روی روتور برابر با 6 است که در بازه های 60 درجه از یکدیگر هستند.
در حالت کلی می توان گفت، 24 موقعیت محتمل یا گام (6 دندانه * 4 سیم پیچ) برای روتور وجود دارد تا بتواند یک دور چرخش خود را کامل کند. بنابراین زاویه گام در این موتور برابر با360∘24=15∘است.
واضح است که تعداد دندانه های روتور بیشتر و یا تعداد سیم پیچ های استاتور بیشتر، به زاویه گام دقیق تر و کنترل بهتر منجر خواهد شد.
با اتصال سیم پیچ های استاتور در آرایش های مختلف، می توان موتورهای با زاویه گام کامل (Full)، نصف (Half) و میکرو (Micro-Step) را ایجاد کرد. اما برای ایجاد زاویه گام میکرو، باید موتور پله ای با جریان سینوسی تغذیه شود که این امر باعث می شود هزینه ساخت موتور پله ای افزایش یابد.
همچنین این امکان وجود دارد که بتوان سرعت دوران یک موتور پله ای را از طریق تغییر تاخیر زمانی بین پالس های دیجیتال اعمالی به سیم پیچ ها (فرکانس) کنترل کرد.
در یک دور چرخش کامل، هر چقدر تاخیر طولانی تر باشد، سرعت دوران کمتر خواهد بود. با اعمال پالس های با تعداد ثابت به موتور، شفت آن با یک زاویه مشخص شروع به چرخیدن می کند.
مزیت استفاده از پالس های تاخیر زمانی در این است که نیازی به استفاده از فیدبک اضافه نخواهد بود؛ زیرا با شمارش تعداد پالس های داده شده به موتور، موقعیت نهایی روتور به صورت دقیق قابل تعیین خواهد بود.
این پاسخ به تعداد مشخص پالس های ورودی دیجیتال، به موتور پله ای اجازه می دهد تا در یک سیستم حلقه باز عمل کند که کنترل آن هم ساده تر و هم ارزان تر است.
به عنوان مثال، فرض کنید موتور پله ای بالا، دارای زاویه گام 3٫6 درجه در هر دور کامل باشد. برای چرخش موتور به اندازه 216 درجه و سپس توقف، به216∘3.6(∘/step)=80pulse پالس نیاز داریم که به سیم پیچ های استاتور اعمال شوند.
آی سی های کنترل موتور پله ای متنوعی وجود دارند که می توانند سرعت چرخش، سرعت هر پله و جهت چرخش را کنترل کنند.
SAA1027 یک نمونه از این آی سی ها است که شامل تمام شمارنده ها و مبدل های کدها به صورت داخلی است و می تواند 4 خروجی پل کنترل شده به موتور را به صورت اتوماتیک در یک رشته صحیح درایو کند. در شکل زیر شماتیکی از آی سی SAA1027 به عنوان یک کنترلر موتور پله ای مشاهده می شود.
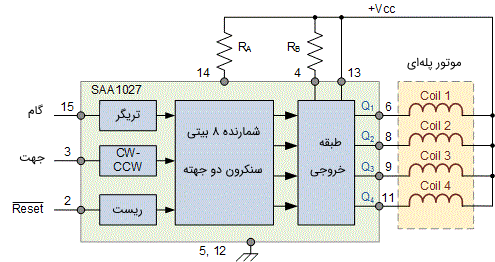
جهت چرخش را نیز می توان هم در مود تک گامی و هم در مود چرخش بدون گام (پیوسته) انتخاب کرد، به صورتی که در هر دو مود، موتور در جهت مورد نظر گردش کند. البته این امکان، بار اضافه ای را روی میکروکنترلر قرار می دهد.
هنگامی که از یک کنترلر دیجیتال 8 بیتی استفاده می شود، 256 میکروگام در هر پله امکان پذیر است.






|
|

|

|
| نماد اعتماد الکترونیک | نشان ملی ثبت | گواهی شامد ارشاد |
![]()
![]()
![]()
![]()
![]()
![]()
© کلیه حقوق مادی و معنوی این وب سایت متعلق به داده پردازان هومان پویان می باشد.

