کنترل و سوئیچینگ موتورهای DC:
موتورهای DC کوچک را می توان با استفاده از کلیدهای مختلف، رله ها، ترانزیستورها و مدارات MOSFET و با بهره گیری از ساده ترین روش های کنترل که با نام کنترل خطی شناخته می شوند، خاموش و روشن و کنترل کرد.

این نوع از مدارات از ترانزیستور دو قطبی (Bipolar) به عنوان کلید برای کنترل موتور از یک منبع تغذیه استفاده می کنند.
البته در مواقعی که به نرخ جریان بالاتری نیاز باشد، می توان از زوج ترانزیستوری دارلینگتون بهره برد.
از طریق تغییر مقدار جریان گذرا از بیس (Base) ترانزیستور، می توان سرعت موتور را کنترل کرد. به عنوان مثال، اگر ترانزیستور به صورت نیم موج روشن شود، آن گاه فقط نیمی از منبع ولتاژ به موتور اعمال می شود.
اما اگر ترانزیستور به صورت کامل روشن شود یا به عبارت دیگر در ناحیه اشباع قرار گیرد (Saturated)، آن گاه تمام ولتاژ تغذیه به موتور می رسد و در نتیجه موتور با سرعت بالاتری می چرخد.
بنابراین برای این کنترل خطی موتور، توان به صورت مداوم و پیوسته به موتور می رسد. نمایی از مدار کنترل سرعت موتور در تصویر زیر نشان داده شده است.
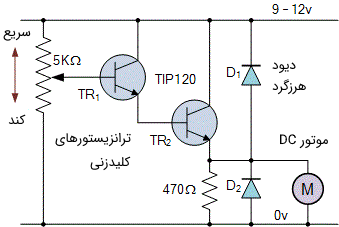
مدار کلیدزنی ساده بالا، نشان دهنده مدار کنترل سرعت یک جهته (Uni-directional) موتور DC است.
چون سرعت چرخش موتور DC متناسب با مقدار ولتاژ دریافت شده در دو سر ترمینال موتور است، در نتیجه می توان مقدار این ولتاژ را با استفاده از ترانزیستور تنظیم کرد و در نهایت سرعت موتور را به این طریق کنترل کرد.
دو ترانزیستور در این مدار بر اساس آرایش دارلینگتون به یکدیگر متصل شده اند تا جریان آرمیچر موتور را کنترل کنند.
یک پتانسیومتر 5 کیلو اهم برای کنترل مقدار بیس ترانزیستور اول یعنی TR1 مورد استفاده قرار گرفته است که این مقدار به صورت متقابل می تواند ترانزیستور اصلی کلیدزنی TR2 را کنترل کند.
ترانزیستور TR2 مقدار ولتاژ موتور DC را از صفر تا ولتاژ تغذیه (VCC) تغییر می دهد. در مثال بالا، مقدار ولتاژ می تواند از 0 تا 12 ولت متغیر باشد.
دیودهای هرزگرد (Flywheel Diodes) در طول ترانزیستور کلیدزنی TR2 و ترمینال های موتور متصل شده اند تا از موتور در برابر نیروی ضدمحرکه القایی تولید شده در حین چرخش، محافظت کنند.
پتانسیومتر قابل تنظیم را می توان با یک سیگنال اعمالی صفر و یک منطقی پیوسته جایگزین کرد.
این سیگنال به صورت مستقیم به ورودی مدار اعمال می شود و موتور را از پورت میکروکنترلر یا PIC به صورت متوالی خاموش (Cut-off) و روشن (Saturation) می کند.
علاوه بر مدار کنترل ساده بالا، مدار مشابهی را نیز می توان برای کنترل سرعت چرخش موتور مورد استفاده قرار داد.
از طریق خاموش و روشن کردن متوالی موتور با فرکانس به اندازه کافی بالا، می توان سرعت موتور را از سرعت سکون (0rpm) تا سرعت کامل (Full Speed) تغییر داد. این کار از طریق تغییر نسبت زمان روشن بودن سیگنال (tON) به زمان خاموش بودن آن (tOFF) انجام می گیرد.
در حالت کلی به این تکنیک برای کنترل موتور، مدولاسیون پهنای پالس (Pulse Width Modulation) می گویند.
کنترل سرعت پهنای باند:
همان طور که قبلا بیان کردیم، سرعت چرخش موتور DC به صورت مستقیم با میانگین مقدار ولتاژ اعمالی به ترمینال های موتور رابطه دارد. هر چقدر میزان ولتاژ اعمالی بیشتر باشد، سرعت چرخش موتور نیز بالاتر خواهد بود.
با تغییر نسبت زمان روشن بودن به زمان خاموش بودن سیگنال کنترلی (که به آن چرخه وظیفه یا Duty Cycle سیگنال می گویند.)، مقدار متوسط ولتاژ موتور و در نتیجه سرعت چرخش آن را می توان تغییر داد. نمایی از یک سیگنال کنترل PWM و دوره تناوب آن در تصویر زیر نشان داده شده است.

برای درایو موتورهای یک جهته ساده، نسبت وظیفه β به صورت زیر محاسبه می شود:

مقدار متوسط ولتاژ DC اعمال شده به موتور برابر است با:

نکته مهمی که وجود دارد این است که ولتاژ موثر در کنترل سرعت موتور DC، مقدار متوسط ولتاژ یا Vmean است که در بالا آن را به دست آوردیم.
بنابراین با تغییر پهنای پالس، ولتاژ موتور و بنابراین توان اعمالی به موتور را می توان کنترل کرد که به آن کنترل PWM می گویند.
روش دیگر برای کنترل سرعت چرخش موتور، تغییر فرکانس و در نتیجه تغییر دوره تناوب ولتاژ کنترلی آن است، به نحوی که زمان چرخه وظیفه یا خاموش و روشن بودن آن، ثابت نگه داشته شود.
این نوع روش کنترل، مدولاسیون فرکانس پالس (Pulse Frequency Modulation) یا PFM نام دارد.
از طریق مدولاسیون فرکانس پالس، می توان ولتاژ موتور را با اعمال پالس های با فرکانس متغیر کنترل کرد.
به عنوان مثال، در فرکانس های پایین یا پالس های با تعداد کم، میانگین ولتاژ اعمالی به موتور نیز پایین خواهد بود.
در فرکانس های بالا یا پالس های با تعداد بالا، میانگین ولتاژ اعمالی به ترمینال موتور نیز بالاتر خواهد بود و در نتیجه موتور با سرعت بالاتری به چرخش ادامه می دهد.
بنابراین، می توان از ترانزیستور برای کنترل توان اعمالی به یک موتور استفاده کرد.
برای این کار می توان از ترانزیستور در مود عملکرد خطی استفاده کرد و مثلا ولتاژ موتور را تغییر داد یا از مدولاسیون پهنای پالس استفاده کرد و عرض پالس ها را کنترل کرد و یا از مدولاسیون فرکانس پالس استفاده کرد و فرکانس پالس ها را تغییر داد.











