موتورهای DC (موتورهای سروو):
موتورهای DC نوع سروو در کاربردهای حلقه بسته مورد استفاده قرر می گیرند. در این کاربردها، موقعیت شفت خروجی موتور به مدار کنترل موتور بازگردانده می شود.

ادوات متداول برای فیدبک موقعیت، مانند ریزولورها (Resolvers)، انکودرها و پتانسیومترها در مدل های کنترل رادیویی مانند هواپیما و قایق ها مورد استفاده قرار می گیرند.
یک سروو موتور معمولا دارای چرخ دنده های داخلی برای کاهش سرعت است و به همین دلیل می تواند گشتاور بالایی را مستقیما منتقل کند.
شفت خارجی یک سروو موتور، به دلیل اتصال چرخ دنده و ادوات فیدبک موقعیت، بر خلاف شفت موتور DC عادی، به صورت آزاد چرخش نمی کند. بلوک دیاگرام یک موتور DC سروو در تصویر زیر نشان داده شده است.
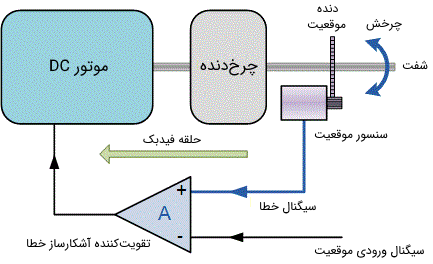
سروو موتور از یک موتور DC به همراه ادوات فیدبک موقعیت و تجهیزاتی برای تصحیح خطا تشکیل شده است.
سرعت یا موقعیت، متناسب با سیگنال ورودی موقعیت یا سیگنال مرجع اعمال شده به وسیله، کنترل می شوند.
تقویت کننده آشکارساز خطا (Error Detection Amplifier) بر سیگنال ورودی نظارت می کند و آن را با سیگنال فیدبک از شفت موتور مقایسه می کند و تصمیم می گیرد که آیا شفت خروجی موتور در موقعیت اشتباهی قرار گرفته است یا خیر.
اگر موقعیت شفت موتور، منجر به تولید سیگنال خطا شود، کنترل کننده سیگنال مناسب را برای تصحیح خطا ایجاد می کند و متناسب با مقدار خطا، سرعت موتور را یا افزایش می دهد و یا آن را کم می کند.
چنین پاسخی به سیگنال فیدبک وقعیت در موتور سروو را سیستم حلقه بسته (Closed Loop System) می نامند.
علاوه بر کاربردهای صنعتی و بزرگ، سروو موتورها در کاربردهای رباتیک و مدل های کنترل از راه دور کوچک نیز مورد استفاده قرار می گیرند.
موتورهای سروو به این دلیل در بازه گسترده ای از کاربردها مورد استفاده قرار می گیرند که قادر هستند 180 درجه در هر دو جهت چرخش کنند و در نتیجه برای کنترل دقیق موقعیت انتخاب بسیار ایده آلی محسوب می شوند.
با این حال، موتورهای سروو نوع RC نمی توانند مانند موتورهای DC عادی به صورت پیوسته در سرعت های بالا بچرخند و برای این منظور باید اصلاحات خاصی روی آن ها انجام گیرد. در شکل زیر نمایی از یک موتور RC دیده می شود.

یک موتور سروو از ادوات مختلفی در یک پکیج تشکیل شده است که عبارتند از:
موتور، چرخ دنده، ادوات فیدبک و تجهیزات تصحیح خطا برای کنترل موقعیت، سرعت و جهت چرخش.
این موتورها به صورت گسترده در مدل های کوچک و رباتیک مورد استفاده قرار می گیرند؛ زیرا به سادگی توسط سه سیم تغذیه، زمین و سیگنال کنترلی قابل کنترل شدن هستند.











