تعریف کنترل نظارتی فازی:
یک سیستم واسط فازی را می توان در یک سطح بالاتر نظارتی از کنترل سلسله مراتبی به کار برد.

کنترل کننده نظارتی، یک کنترل کننده ثانویه است که کنترل کننده موجود را به گونه ای تقویت می کند تا اهدافی که بدون نظارت امکان نخواهد داشت محقق شوند.
برای مثال، یک کنترل کننده نظارتی می تواند پارامترهای یک کنترل کننده سطح پایین را بر اساس اطلاعات فرایند تنظیم کند (شکل 8).
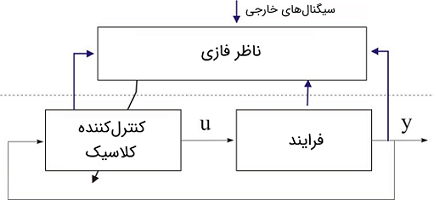
شکل 8: کنترل نظارتی فازی
به این ترتیب، رفتار استاتیکی و دینامیکی سیستم کنترل سطح پایین را می توان برای مقابله با غیرخطی بودن یا تغییرات در شرایط زیست محیطی یا کاری اصلاح کرد. یک مزیت ساختار نظارتی این است که می توان آن را به سیستم های کنترل موجود قبلی افزود.
از این رو، همیشه می توان از کنترل کننده ای اصلی (اولیه) به عنوان کنترل کننده های اولیه استفاده کرد و کنترل کننده نظارتی را به گونه ای تنظیم نمود که عملکرد آن بهبود یابد.
یک ساختار نظارتی را می توان برای پیاده سازی استراتژی های کنترلی مختلف در یک کنترل کننده تکی به کار برد.
یک مثال، انتخاب کنترل کننده تناسبی با یک بهره بالا در هنگامی است که سیستم بسیار دور از سیگنال مرجع مطلوب باشد و کنترل PI را در نزدیکی سیگنال مرجع سوئیچ کند.
از آنجایی که پارامترها برای هر پاسخ دینامیکی تغییر کرده اند، کنترل کننده های نظارتی در حالت کلی غیرخطی هستند.
بسیاری از فرایندهای صنعتی با کنترل کننده های PID کنترل می شوند. علی رغم مزایای این کنترل کننده ها، وقتی شرایط عملکرد تغییر کند، باید دوباره آن ها را تنظیم کرد.
این عیب را می توان با استفاده از یک ناظر فازی برای تنظیم پارامترهای کنترل کننده سطح پایین رفع کرد.
بدین ترتیب، می توان مجموعه ای از قواعد را از خبره ها برای تنظیم بهره هایPوD یک کنترل کننده PD، برای مثال بر اساس نقطه تنظیم فعلیr، به دست آورد.
قواعد می توانند این گونه باشند: اگر خروجی فرایند بالا باشد، آنگاه کمی بهره تناسبی را کاهش بده و به اندازه متوسط بهره مشتقی را زیاد کن.
کنترل کننده TS را می توان به عنوان یک نسخه ساده از کنترل نظارتی در نظر گرفت. به عنوان مثال، قواعد تاکاگی-سوگنوی شکل 8 را می توان برحسب قواعد ممدانی یا یگانه (Singleton) نوشت که خروجی های آن ها پارامترهای P و D است.
این کنترل کننده ها در مسیر یک کنترل کننده PD استاندارد در یک سطح پایین تر قرار داده می شوند.











