خانه
اپلیکیشن زینگ
آشنایی و همکاری
سامانه صادرات و واردات
فروشگاه
خدمات اطلاعاتی
اخبار و مقالات
تماس با ما


تعریف کنترل کننده ممدانی در الکترونیک:
کنترل کننده ممدانی (Mamdani Controller) معمولاً به عنوان یک کنترل کننده فیدبک مورد استفاده قرار می گیرد.

از آنجایی که قاعده محوری یک نگاشت استاتیکی بین متغیرهای قبلی و بعدی است، باید از فیلترهای دینامیکی خارجی برای به دست آوردن رفتار دینامیکی مطلوب کنترل کننده استفاده کرد (شکل 2).
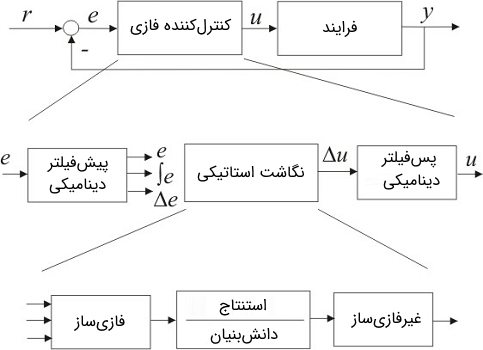
شکل 2: کنترل کننده فازی در یک پیکربندی حلقه بسته (بخش بالایی) که از فیلتر های دینامیکی و یک نگاشت استاتیکی (شکل وسط) تشکیل شده است. نگاشت استاتیکی بر بنیان دانش، ساز و کار استنتاج و استنتاج های فازی ساز و و غیرفازی ساز تشکیل شده است.
پروتکل کنترل به فرم قواعد اگر-آنگاه در پایگاه قواعد ذخیره می شود که بخشی از پایگاه دانش است. در حالی که قوانین مبتنی بر دانش کیفی هستند، توابع عضویتی که عبارات زبانی را تعریف می کنند، یک استنتاج هموار را برای متغیرهای فرایند عددی و نقاط تنظیم ارائه می دهند.
فازی ساز (Fuzzifier) درجات عضویت متغیرهای ورودی کنترل کننده را در مجموعه های فازی مرجع تعیین می کند.
ساز و کار استنتاج یا همان موتور استنتاج این اطلاعات را با دانشِ ذخیره شده در قواعد ترکیب کرده و خروجی سیستم مبتنی بر قواعد را تعیین می کند. برای اهداف کنترل، یک سیگنال کنترل قطعی یا دقیق لازم است.
غیرفازی ساز (Defuzzifier) مقدار این سیگنال قطعی را از خروجی های کنترل کننده فازی محاسبه می کند.
در شکل 2، می توان دید که نگاشت فازی تنها بخشی از کنترل کننده فازی است. پردازش سیگنال قبل و بعد از نگاشت فازی ضروری است.
پیش فیلترها و پس فیلترها ورودی ها و خروجی های کنترل کننده را پردازش می کنند. این فیلترهای دینامیکی معمولاً مقیاس بندی سیگنال و فیلترسازی دینامیکی را انجام می دهند، مثلاً مشتق و انتگرال خطای کنترل یا سیگنال کنترل را محاسبه می کنند.
این تفکیک کنترل کننده به یک نگاشت استاتیکی (ایستا) و فیلتر های دینامیکی (پویا) را می توان برای اغلب ساختارهای کنترل کلاسیک انجام داد.
برای درک بهتر، یک کنترل کننده PID را در نظر بگیرید که معادله آن به صورت زیر است:

که در آن، u(t) سیگنال کنترلی است که به فرایند تحت کنترل اعمال می شود و e(t)=r(t)-y(t) سیگنال خطا، یعنی اختلاف بین خروجی مطلوب و خروجی اندازه گیری شده فرایند است. معادله (1) یک تابع خطی (از نظر هندسی، یک ابرصفحه) است:


در یک کنترل کننده منطق فازی، تابع غیرخطیf با یک نگاشت فازی نمایش داده می شود. بدیهی است که کنترل کننده های فازی را می توان مشابه با کنترل کننده هایP، PI، PD یا PID خطی، با استفاده از فیلترهای دینامیکی مناسب، مانند مشتق گیرها و انتگرال گیرها طراحی کرد.
ماهیت سیستم های فازی ممدانی، بسیار نزدیک به ماهیت کنترل دستی است. این نوع کنترل کننده ها با مشخص کردن خروجی به ازای ترکیب هایی از سیگنال های ورودی مختلف تعریف می شوند. هر ترکیب سیگنال ورودی به صورت قاعده ای به فرم زیر است:
Ri: اگرx1به صورتAi1باشد و … وxnبه صورتAinباشد، آنگاهuبه صورتBiاست (i=1,2,…,K).(4)
در این کنترل کننده ها، ممکن است از بعضی رابط ها یا عملگرهای دیگر، مانند «یا» (OR) یا «نه» (NOT) نیز استفاده شود.
در سیستم های فازی ممدانی، مجموعه های فازی مقدم (Antecedent) و مؤخر (Consequent) اغلب به صورت مثلثی یا گاوسی انتخاب می شوند.
همچنین، رایج است که توابع عضویت ورودی، به گونه ای با یکدیگر همپوشانی داشته باشند که مقادیر عضویت قاعده مقدم همیشه به 1 جمع شوند (مجموعشان 1 شود).
در این حالت، و اگر پایگاه قواعد به فرم عطفی باشد، می توان هر قاعده را به عنوان تعریف مقدار خروجی برای یک نقطه در فضای ورودی تفسیر کرد.
این نقطه در فضای ورودی، با به دست آوردن مراکز مجموعه های فازی ورودی به دست می آید. در نتیجه، مقدار خروجی، مرکز مجموعه فازی خروجی است (روش مرکز مساحت).
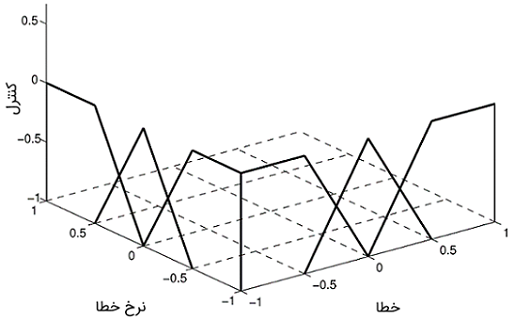
همان طور که در شکل 3 نشان داده شده است، استدلال فازی، منجر به یک درون یابی نرم (هموار) بین نقاط فضای ورودی می شود.
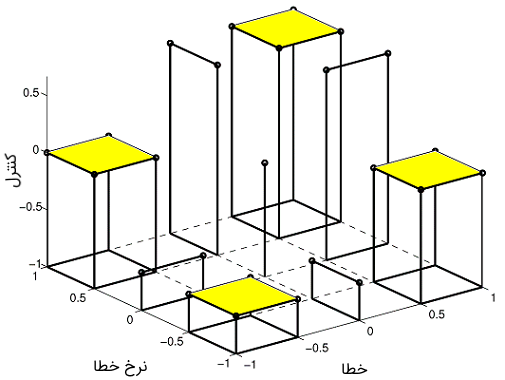
شکل 4: هر قاعده مقدار خروجی را برای یک نقطه یا ناحیه در فضای ورودی تعریف می کند.






|
|

|

|
| نماد اعتماد الکترونیک | نشان ملی ثبت | گواهی شامد ارشاد |
![]()
![]()
![]()
![]()
![]()
![]()
© کلیه حقوق مادی و معنوی این وب سایت متعلق به داده پردازان هومان پویان می باشد.

