خانه
اپلیکیشن زینگ
آشنایی و همکاری
سامانه صادرات و واردات
فروشگاه
خدمات اطلاعاتی
اخبار و مقالات
تماس با ما


کنترل تطبیقی چیست؟
«تطبیق یافتن» معادل "to adapt" و به معنی «تغییر دادن به گونه ای که رفتار موجود با شرایط جدید مطابقت داشته باشد» است.

کنترل تطبیقی نیز بر همین مطابقت با تغییر اشاره دارد. اصطلاحات «سیستم های تطبیقی» (Adaptive Systems) و «کنترل تطبیقی» (Adaptive Control) به اوایل دهه 1950 بر می گردند.
همان طور که گفتیم، طراحی خلبان های خودکار برای هواپیماها یکی از انگیزه های اولیه برای تحقیقات در زمینه کنترل تطبیقی بود.
هواپیماها در سرعت ها و ارتفاع های مختلفی کار می کنند و دینامیک آن ها غیرخطی و متغیر با زمان است.
برای یک نقطه کار مشخص (سرعت و ارتفاع)، دینامیک پیچیده هواپیما را می توان با با یک مدل خطی تقریب زد. برای مثال، در نقطه کارi، مدل خطی هواپیما به فرم زیر است:

که در آن، Ai، Bi، Ci و Di تابع شرایط نقطه کار i هستند. وقتی هواپیما در شرایط مختلف پرواز قرار گیرد، نقاط کار تغییر کرده و منجر به مقادیر مختلفAi، Bi، Ci و Di خواهد شد.
از آنجایی که پاسخ خروجیy(t) اطلاعاتی درباره حالت x و همچنین پارامترها دارد، انتظار می رود یک کنترل کننده فیدبک پیشرفته این توانایی را داشته باشد که تغییرات پارامتر را با پردازشy(t) یاد گرفته و از بهره های مناسب برای سازگاری با آن ها استفاده کند.
این گفته منجر به یک ساختار کنترل فیدبک می شود که کنترل تطبیقی بر آن بنا شده است.
ساختار این کنترل کننده از یک حلقه فیدبک و یک کنترل کننده با بهره های قابل تنظیم تشکیل شده است (شکل 1).
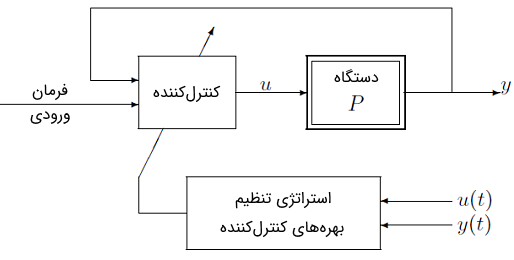
روش تغییر بهره های کنترل کننده در پاسخ به تغییرات دستگاه و دینامیک اغتشاش منجر به طرح های کنترلی متفاوتی می شود. در ادامه، طرح های مختلف کنترل تطبیقی را بررسی می کنیم.






|
|

|

|
| نماد اعتماد الکترونیک | نشان ملی ثبت | گواهی شامد ارشاد |
![]()
![]()
![]()
![]()
![]()
![]()
© کلیه حقوق مادی و معنوی این وب سایت متعلق به داده پردازان هومان پویان می باشد.

