روش شناسی شناسایی عیب در سیستم:
در عمل، یک روش پرکابرد برای تشخیص عیب، مانیتور کردن یا ردیابی یک سیگنال مشخص است تا در صورتی که سطح سیگنال مذکور به حدود اشباع رسیده باشد، تصمیم مناسب برای آن وضعیت اتخاذ شود. این روش تشخیص عیب با وجود سادگی، داری نواقص جدی در پیاده سازی است.

اولین نقص، احتمال آلارم های اشتباه به دلیل وجود نویز، تغیرات سیگنال مرجع و تغییرات نقطه کاری سیستم است.
نقص دوم این است که یک عیب می تواند منجر به اشباع حدود در سیگنال های چند نقطه از سیستم شود که در نتیجه این امر، فرآیند جداسازی عیب (یعنی تشخیص محل و نوع وقوع عیب) با مشکل روبرو خواهد شد.
استفاده از روش چک کردن تطابق تعدادی از سیگنال های سیستم یک روش مهم برای افزایش قابلیت کشف، جداسازی و یا تشخیص عیب سیستم های خودکار است که می تواند مشکلات بالا را حل کند. با این حال، یک مدل ریاضی که بتواند ارتباط ریاضی بین سیگنالهای مختلف سیستم را مشخص کند، امری ضروری به نظر می رسد.
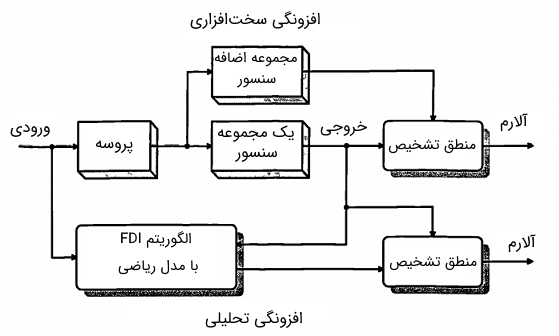
یک روش سنتی برای تشخیص عیب، مبتنی بر افزونگی (Redundancy) سخت افزار (فیزیکی/موازی) است که از راه های چندگانه ای از سنسورها، عملگرها و کامپیوترها و نرم افزارها برای اندازه گیری و یا کنترل یک متغیر مشخص استفاده می کند.
معمولا یک سیستم رای گیری به سیستم افزونگی سخت افزار برای اتخاذ تصمیم در صورت وقوع عیب اضافه خواهد شد و محل آن احتمالا در میان اجزای سیستم افزونگی است.
استفاده از افزونگی چندگانه یکی از روش های رایج تشخیص عیب است که به عنوان مثال در سیستم کنترل پرواز AIRBUS20 و یا در راکتورهای هسته ای از آن استفاده می شود. مشکلات عمده روش افزونگی سخت افزار، وجود تجهیزات اضافه و هزینه نگهداری و بنابراین نیاز به فضای بیشتر برای جای دهی تجهیزات است.
از نقطه نظر تضاد بین قابلیت اطمینان و هزینه اضافه کردن تجهیزات جدید، استفاده از مقادیر اندازه گیری شده غیرمشابه برای چک کردن متقابل داده ها نسبت به تکثیر تکی سخت افزارها، معقول تر به نظر می رسد.
این موضوع با عنوان افزونگی تحیلی شناخته می شود که در آن از ارتباط تحیلی افزونگی بین متغیرهای مختلف اندازه گیری شده از پلانت تحت نظارت (نظیر ورودی به خروجی، خروجی به خروجی، ورودی به ورودی) استفاده می کند.
هیچ گونه عیب سخت افزار اضافی در یک الگوریتم افزونگی تحلیلی استفاده نمی شود، زیرا هیچ گونه تجهیزات اضافه ای لازم نیست، از این رو افرونگی تحلیلی پتانسیل قابلیت اطمینان بیشتری، نسبت به افزونگی سخت افزاری را دارا است. شکل زیر تفاوت مفاهیم افزونگی تحیلی و افزونگی سخت افزار را نشان می دهد.
در الگوریتم افزونگی تحلیلی، تفاوت نتیجه تولید شده از چک کردن تطابق متغیرهای مختلف با عنوان سیگنال مانده یاد می شود. سیگنال مانده در حالتی که سیستم در شرایط عادی کار می کند، برابر با صفر است و هنگامی که عیبی در سیستم اتفاق افتد، مقداری غیرصفر به حساب می آید.
خاصیت صفر و غیرصفر بودن سیگنال مانده برای تشخیص وقوع و یا عدم وقوع عیب مورد استفاده قرار می گیرد. افزونگی تحیلی از مدل ریاضی پروسه تحت نظارت استفاده می کند به همین دلیل به عنوان یک روش تشخیص عیب بر اساس مدل پروسه شناخته می شود.
چک کردن تطابق در افزونگی تحلیلی اغلب از طریق مقایسه بین سیگنال اندازه گیری شده و تخمین آن انجام می شود.
تخمین سیگنال نیز توسط مدل ریاضی پروسه تحت نظارت صورت می پذیرد. بنابراین در حالت کلی می توان گفت که مقایسه با استفاده از کمیت های مانده یا به عبارت دیگر اختلاف بین سیگنال اندازه گیری شده و تخمین سیگنال توسط مدل ریاضی، انجام می شود.
بنابراین تشخیص عیب بر اساس مدل را می توان به این صورت تعریف کرد که تعیین عیب سیستم از طریق مقایسه سیگنال های اندازه گیری شده از سیستم با اطلاعات قبلی حاصل شده از مدل ریاضی پروسه مدل (تولید سیگنال مانده) انجام می گیرد. یک مانده، یک نشانگر عیب یا سیگنال تأکید است که موقعیت معیوب سیستم تحت نظارت را بازگو می کند.
یکی از مزیت های مهم تشخیص عیب بر اساس مدل این است که نیازی به سخت افزار اضافه برای تحقق یک الگوریتم تشخیص عیب ندارد.
الگوریتم تشخیص عیب بر اساس مدل می تواند به صورت نرم افزاری در داخل کامپیوتر کنترل کننده پروسه اجرا شود. علاوه بر این، اندازه گیری هایی که برای کنترل پروسه لازم است، برای تشخیص عیب نیز کافی است و در اغلب موارد نیاز به نصب سنسورهای جدید نداریم.
اما نکته مهمی که وجود دارد این است که در این شرایط ظرفیت ذخیره سازی و قدرت پردازش کامپیوتری بیشتری برای تحقق تشخیص عیب افزونگی تحلیلی لازم می شود. البته پیشرفت های چشم گیر در تکنولوژی کامپیوتر تحقق چنین روش هایی را عملی و امکان پذیر ساخته است.
یک وظیفه مهم طرح تشخیص عیب بر اساس مدل این است که قبل از اینکه به موقعیتی برسیم که نیاز به دخالت مستقیم اپراتور انسانی و یا سیستم اتوماتیک باشد، توانایی تشخیص عیوب اولیه در سیستم وجود داشته باشد.
تشخیص عیوب سخت و ناگهانی نسبتا آسان است؛ زیرا این نوع از عیوب بیشتر بر روی سیستم تشخیص عیب اثر می گذارند تا بر روی عدم قطعیت مدل، در نتیجه می توان با تعریف یک سطح اشباع مناسب به وجود آن ها پی برد.
توجه کنید که عیوب اولیه، اثر بسیار کمی بر روی مقادیر مانده دارند و در نتیجه ممکن است به عنوان عدم قطعیت مدل شناخته شود. این امر نیاز به مقاوم بودن الگوریتم تشخیص عیب را دو چندان می کند. تأثیر یک عیب اولیه بر روی عملکرد سیستم تحت نظارت به شدت ناچیز و غیر قابل رویت است.
با این حال عیوب اولیه به آهستگی رشد پیدا می کنند و در نهایت منجر به خسارات جدی به سیستم می شوند.
گرچه در مراحل اولیه وقوع عیب ممکن است، عیب برای سیستم تشخیص عیب قابل تحمل باشد. اما باید دقت کرد که عیب نرم یک شرایط بد کار کردن سیستم است که در مراحل اولیه قابل تحمل است و خطرات جدی به همراه ندارد و به مرور زمان گسترده و گسترده تر می شود.
وجود عیب نرم لزوما عملکرد پلانت را به صورت قابل ملاحظه پایین نمی آورد، با این وجود این چنین عیوبی نشان دهنده این مهم هستند که سنسورها و یا سایر اجزای سیستم باید جایگرین گردند و یا اینکه قبل از اینکه احتمال وقوع بدکارکردن های خطرناک افزایش یابد، باید سیستم را دوباره پیکربندی کرد.
نشانه های سریع عیوب اولیه، می توانند اطلاعات و زمان کافی را به اپراتورها (و یا سیستم کنترل اتوماتیک) برای اخذ تصمیم قاطع برای جلوگیری کردن از خرابی های جدی در سیستم بدهد. بنابراین تشخیص و کشف موفقیت آمیز عیب نرم، می تواند به عنوان چالش برانگیزترین و سخت ترین بخش الگوریتم های تشخیص عیب در صنایع ایمنی-حیاتی در نظر گرفته شود.
درخت عیب:
مدل سازی و آنالیز سیستم به کمک درخت عیب اولین بار در سال 1962 در آزمایشگاه بل و تحت نظارت نیروی هوایی آمریکا مطرح شد و امروزه به عنوان یکی از پرکاربردترین روش ها در حوزه مدل سازی حالات خرابی سیستم، ارزیابی، تشخیص و مکان یابی عیوبِ سیستم در سطح وسیعی از رشته های مهندسی مورد استفاده قرارگرفته است.
درخت عیب یک دیاگرام سلسله مراتبی است که به صورت استنتاجی از روی ساختار عملکردی یک سیستم ترسیم می شود و در آن تمامی راه های ممکن برای خرابی سیستم (شامل علل و عوامل نامطلوب) به تصویر کشیده می شود. این مدل به دو صورت کمی و کیفی قابل ارزیابی است.
در این مدل بالاترین المان، نماینده وقوع رویداد نامطلوب در سیستم و پایین ترین المان، نماینده رویدادهای پایه است.
رویداد نامطلوب در سیستم، رویدادی است که از دیدگاه قابلیت اطمینان و ایمنی بحرانی و خطرناک محسوب می شود. اما رویدادهای پایه معمولاً خرابی اجزای یک سیستم در پایه ترین سطح ممکن هستند. در تصویر نمایش درخت عیب یک سیستم نشان داده شده است.

آنالیز وقوع رویداد سطح بالاتر، به کمک جبر بول و از روی ترکیب مجموعه ای از رویدادهای سطح پایین تر صورت می پذیرد. در این درخت، بالاترین رویداد را رویداد نهایی (Top Event) و پایین ترین رویداد را رویداد پایه (Basic Event) می نامند.
رویدادهای پایه به کمک گیت های منطقی به یکدیگر متصل می شوند و رویدادهای سطوح بالاتر را می سازند.
در یک درخت استاتیکی هر گاه خرابی یک جزء به تنهایی باعث خرابی یک سیستم یا زیرسیستم شود، آنگاه تعامل این خرابی با دیگر خرابی ها را با گیت OR نشان می دهند. همچنین هرگاه سیستمی وجود داشته باشد که برای خرابی آن بایستی تمام اجزاء معیوب شوند آنگاه آن سیستم و اجزای متعلق به آن را با گیت AND مدل می کنند. بدیهی است که هر ترکیب دیگری از سیستم ها با ترکیب این دو گیت ساخته می شود.
همچنین لازم است ذکر شود به این نوع درخت استاتیکی درخت همدوس می گویند. در برخی از کاربردها، سیستم ها علاوه بر ماهیت سری، موازی و سری-موازی، ماهیت دینامیکی و وابسته به زمان نظیر اولویت خرابی، ترتیب و توالی، وابستگی عملکردی، رزرو و تعمیر در خود دارند که به موجب آن نیاز به یک مدل دینامیکی وجود خواهد داشت.
به همین جهت مدل درخت عیب دینامیکی در دهه 90 توسط دوگان مطرح گردید و تا به امروز تحقیقات فراوانی در زمینه افزایش کارایی این نوع درخت انجام شده است.
در مدل سازی درخت های عیب دینامیکی علاوه توصیف گیت های دینامیکی، لحاظ مواردی نظیر پوشش نامناسب عیوب، عیوب منشأ مشترک، شوک های مخرب و غیر مخرب، نیز مورد بحث قرار می گیرد.
درخت عیب کاربردهای فراوانی در صنعت دارد که برخی از کاربردهای درخت عیب عبارت اند از:
- به کمک درخت عیب، فهم و درک مسیرهای منطقی ای که منجر به وقوع رویداد نامطلوب و یا خرابی سیستم می شوند، امکان پذیر می گردد.
- پارامترهایی نظیر قابلیت اطمینان، ایمنی و میانگین زمانی تا خرابی، توسط درخت عیب قابل ارزیابی هستند.
- با ترکیب درخت عیب و روش های ارزیابی حساسیت می توان محتمل ترین مسیرهای خرابی و گلوگاه های خرابی سیستم را تعیین نمود.
- به کمک درخت عیب کاهش و بهینه سازی منابع و نیازمندی های سیستم امکان پذیر می شود.
- درخت عیب ابزاری مفید برای مدل سازی نیازمندی ها و تجهیزات است.
- درخت عیب ابزار تشخیص، مکان یابی، ریشه یابی و جداسازی عیوب در سیستم های صنعتی است.
نمایش گرافیکی و منطقی درخت عیب دید خوب و عمیقی به منظور شناخت ساختار سیستم از لحاظ خرابی به مهندسان طراح و بهره بردار آن می دهد.
درخت عیب به آن ها امکان عیب یابی سیستماتیک را داده و با مشخص نمودن گلوگاه های خرابی امکان تقویت سیستم در برابر خرابی اجزای بحرانی را امکان پذیر می کند. همچنین درخت عیب روشی شناخته شده برای تشخیص و پیش بینی عیوب در سیستم ها است.
روش های تشخیص و ریشه یابی عیب را می توان به دو دسته کلی مبتنی بر مدل و مبتنی بر تاریخچه فرایند دسته بندی کرد که هر کدام خود به دو زیرشاخه روش های کمی و کیفی تقسیم می شوند.
درخت عیب را می توان به عنوان یکی از مدل های علت و معلول به حساب آورد که جزئی از روش های مبتنی بر مدل کیفی است. علت کیفی بودن این روش آن است که می بایست توسط یک کارشناس و خبره برای هر سیستم مدل سازی انجام شود و می توان گفت این روش مبتنی بر ساختار سیستم است.
پیش بینی عیب یکی از موضوعات بسیار مهم در صنعت است که از نظر جایگاه بعد از تشخیص و ریشه یابی عیب قرار دارد.
در پیش بینی عیوب، حالت های تنزل یافته در سیستم مورد بررسی قرار می گیرند و پس از تنزل سیستم به یکی از آن ها، مدت زمانی که طول می کشد تا سیستم معیوب شود و از کار بیفتد، تخمین زده می شود.
یکی از پارامترهای پرکاربرد برای پیش بینی عیوب، پارامتر عمر مفید باقی مانده (RUL) است که در برخی از مراجع آن را برابر با پارامترهایی نظیر MTTF در سیستم های غیرقابل تعمیر و MTBF در سیستم های قابل تعمیر می دانند.
از آنجایی که درخت عیب دینامیکی روشی ساختاریافته و قدرتمند برای ارزیابی قابلیت اطمینان است و پارامترهای MTBF و MTTF با انتگرال گیری از روی آن به دست می آیند، در نتیجه می توان از درخت عیب دینامیکی برای پیش بینی عیوب نیز استفاده کرد. در تصویر زیر مراحل اساسی ریشه یابی و پیش بینی عیب نشان داده شده است.

اما با وجود کارکرد بسیار مناسب درخت عیب در تشخیص، جداسازی و پیش بینی عیب، این روش هوز دارای چالش های فراوانی است که در شکل زیر نشان داده شده است.
به عنوان مثال مدل سازی برخی خواص دینامیکی سیستم نظیر تعمیر، ترتیب و توالی، وابستگی عملکردی، رزرو و غیره به کمک این روش امکان پذیر نیست که این امر سبب شده است که در دهه اخیر تحقیقات بی شماری به منظور افزودن قابلیت های دینامیکی به درخت عیب صورت گیرد.











