خانه
اپلیکیشن زینگ
آشنایی و همکاری
سامانه صادرات و واردات
فروشگاه
خدمات اطلاعاتی
اخبار و مقالات
تماس با ما


فیلتر کالمن چیست؟
فیلترهای کالمن در حقیقت فیلترهای تخمین گر بهینه درجه دوم هستند که توسط «رودولف کالمن» اختراع شدند و هدف اساسی آن ها تخمین حالت های سیستم با داشتن اطلاعات جزیی از آن سیستم است.

به عنوان مثال یک سیستم مرتبه ده را در نظر بگیرید. طبیعتا این سیستم دارای ده متغیر حالت است، اما اندازه گیری همه متغیرهای حالت با استفاده از ده سنسور مختلف هزینه های زیادی دارد و در کاربردهای عملی نمی توان از این روش استفاده کرد.
در نتیجه فقط تعداد محدودی از متغیرهای حالت و یا تابعی از آن ها اندازه گیری می شود و با داشتن مدل ریاضی سیستم بقیه متغیرهای حالت باید تخمین زده شوند.
البته این تنها کاربرد فیلترهای کالمن نیست. گاهی اوقات ما فقط می توانیم یک داده با نویز شدید را از سیستم دریافت کنیم.
به عنوان مثالی از این حالت می توان به داده های موقعیت اندازه گیری شده توسط سنسورهای GPS اشاره کرد.
در قدم بعد می توان توسط یک فیلتر این داده به شدت نویزی را پالایش کرد و داده بهتر و دقیق تری به دست آورد. یکی از بهترین فیلترهایی که در اغلب کاربردهای صنعتی برای این هدف مورد استفاده قرار می گیرند، فیلترهای کالمن هستند.
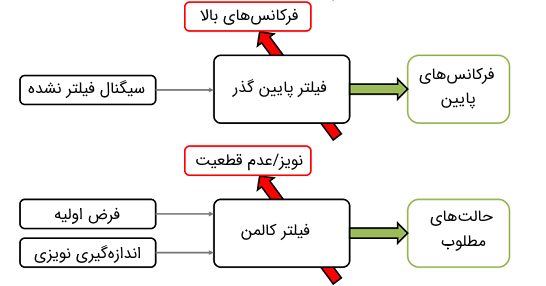
البته ممکن است عنوان فیلتر برای فیلتر کالمن مبهم باشد. برای رفع این ابهام یک فیلتر پایین گذر را در نظر بگیرید. وظیفه فیلتر پایین گذر این است که نویزهای فرکانس بالا که در سیگنال ورودی وجود دارد را حذف کند تا سیگنال صاف تر و بهتری به دست آید.
به صورت مشابه وظیفه فیلتر کالمن نیز این است که از داده های خامی که وجود دارد، اثرات نویزهای خارجی و عدم قطعیت ها بیرون کشیده شود و تخمین بهتری از اطلاعات واقعی حاصل شود.
این تشابه در شکل زیر نیز به تصویر کشیده شده است. فیلتر کالمن اطلاعاتی که دارای مقداری خطا، نویز و عدم قطعیت هستند را دریافت می کند و اطلاعات دقیق تری را در اختیار قرار می دهد. در تصویر زیر مقایسه ای بین فیلتر پایین گذر و فیلتر کالمن انجام شده است.






|
|

|

|
| نماد اعتماد الکترونیک | نشان ملی ثبت | گواهی شامد ارشاد |
![]()
![]()
![]()
![]()
![]()
![]()
© کلیه حقوق مادی و معنوی این وب سایت متعلق به داده پردازان هومان پویان می باشد.

