پایه های ماژول سنسور PIR:

شکل زیر یک ماژول سنسور PIR را نشان می دهد.
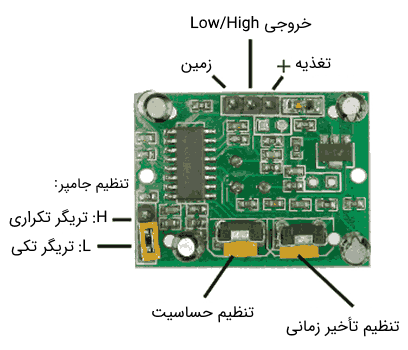
- پایه 1 (GND): این پایه به زمین وصل می شود.
- پایه 2 (خروجی): این پایه با تشخیص حرکت خروجی 3٫5 ولتی می دهد.
- پایه 3 (Vcc): این پایه ولتاژ تغذیه (5 ولت) سنسور PIR و مدار داخلی را تأمین می کند.
این سنسور PIR دو حالت عملکردی دارد: تریگر تکی و تریگر تکراری.
حالت تریگر تکی:
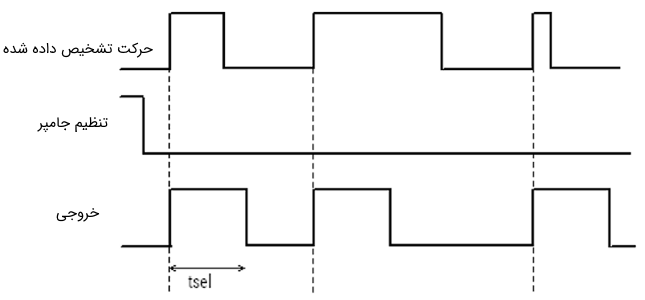
برای انتخاب حالت تریگر تکی، جامپر سنسور PIR باید روی LOW تنظیم شود. در حالت تریگر تکی، وقتی حرکت تشخیص داده شود، خروجی HIGH می شود. پس از تأخیر معین (tsel) حتی اگر جسم در حال حرکت باشد، خروجی LOW خواهد شد. خروجی برای مدتی LOW است و اگر جسم در حرکت باقی بماند، دوباره HIGH می شود. این تأخیر معین (tsel) توسط کاربر و با استفاده از پتانسیومتر اعمال می شود.
این پتانسیومتر در ماژول سنسور PIR قرار دارد. به این ترتیب، اگر جسم در حرکت مداوم باشد، سنسور PIR پالس های HIGH/LOW خواهد داشت.
حالت تریگر تکراری:
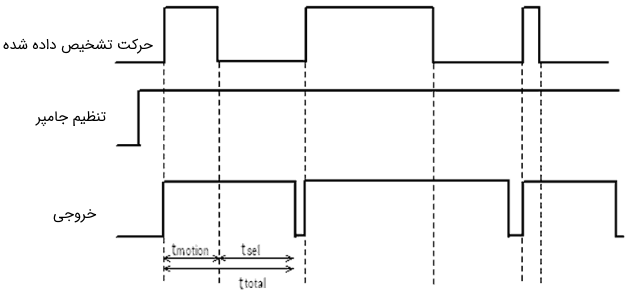
برای انتخاب حالت تریگر تکراری، جامپر سنسور PIR باید روی HIGH تنظیم شود. در این حالت، خروجی با تشخیص حرکت HIGH می شود. خروجی سنسور PIR تا زمانی که جسم در حرکت نباشد، HIGH است.
وقتی جسم حرکت را متوقف می کند یا از زاویه دید سنسور ناپدید می شود، PIR به اندازه تأخیر زمانی مشخص (Tsel) حالت HIGH خود را ادامه می دهد. با تنظیم پتانسیومتر می توانیم این تأخیر (tsel) را اعمال کنیم. این پتانسیومتر در ماژول سنسور PIR قرار دارد. به این ترتیب، اگر جسم در حرکت مداوم باشد، سنسور PIR پالس HIGH می دهد.
تغییر حساسیت و زمان تأخیر در ماژول سنسور PIR:
در برد سنسورهای حرکت PIR دو پتانسیومتر به کار رفته است: پتانسیومتر تنظیم حساسیت و پتانسیومتر تنظیم زمان تأخیر.
می توان سنسور PIR را به میزان لازم حساس یا غیرحساس کرد. حداکثر حساسیت تا 6 متر قابل دستیابی است.
پتانسیومترِ تنظیم زمان تأخیر برای تنظیم زمان نشان داده شده در نمودارهای زمان بندی بالا استفاده می شود. حرکت در جهت عقربه های ساعت حساسیت PIR را بیشتر می کند.
سنسور PIR با عدسی فرنل:
شکل زیر آشکارساز PIR را با لنز (عدسی) فرنل نشان می دهد.

هنگام ساخت سنسور PIR در نظر گرفتن دو نکته مهم است: هزینه کم و حساسیت بالا که با استفاده از درپوش عدسی می توان به هر دو این موارد دست یافت. عدسی ها دامنه عملکرد را افزایش می دهند، حساسیت را زیاد می کنند و الگوی حس را به راحتی تغییر می دهند.
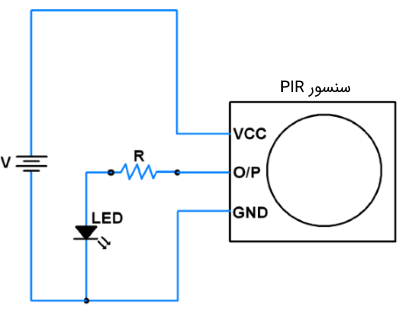
تست سنسور PIR:
شکل زیر مدار ساده ای را نشان می دهد که با استفاده از آن می توان سنسور PIR را تست کرد.
محدوده کاری سنسورهای PIR به شرح زیر است:
- سنسور PIR داخلی: فواصل تشخیص از 25 سانتی متر تا 20 متر است.
- سنسور PIR داخلی پرده ای: فاصله تشخیص از 25 سانتی متر تا 20 متر است.
- سنسور PIR خارجی (فضای باز): فاصله تشخیص از 10 متر تا 150 متر است.
- سنسور PIR خارجی پرده ای: فاصله از 10 متر تا 150 متر











