آشنایی با ماژول L298:
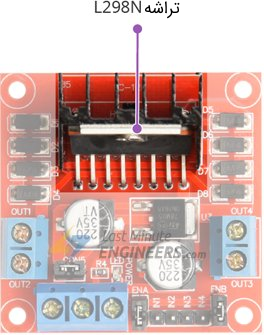
در قلب ماژول L298 تراشه بزرگ و مشکی L298N همراه با هیت سینک قرار دارد. ماژول L298 و به طور دقیق تر، ماژول L298N یک درایور موتور پل اچ دو کاناله است که می تواند یک جفت موتور DC را کنترل کند.

این بدان معنی است که ماژول L298 می تواند به صورت جداگانه تا دو موتور را هدایت کند و این قابلیت، ماژول L238 را برای ساخت کنترل کننده های ربات های دوچرخ ایده آل می کند.
منبع تغذیه ماژول L298:
ماژول درایور موتور L298N از طریق 3 پین 3٫5 میلی متری تغذیه می شود و شامل پین هایی برای منبع تغذیه موتور (Vs)، زمین و منبع تغذیه 5 ولت (Vss) است.
تذکر: آی سی درایور 298N در واقع دارای دو پایه توان ورودی است: "Vss" و "Vs". پل اچ از پین Vs توان خود را برای هدایت موتورها دریافت می کند. ولتاژ این پین می تواند 5 تا 35 ولت باشد.
ولتاژ Vss برای تغذیه مدارهای منطقی است که مقدار آن ممکن است بین 5 تا 7 ولت باشد. هر دوی این ولتاژ ها زمین مشترکی به نام "GND" دارند.
ماژول تصویر زیر، دارای یک رگولاتور ولتاژ 78M05 با مقدار 5 ولت است که سازنده آن اس تی مایکروالکترونیکس (STMicroelectronics) است. این رگولاتور روی برد، از طریق جامپر فعال یا غیرفعال می شود.
وقتی این جامپر در مدار قرار داده شود، رگولاتور 5 ولت فعال می شود و منبع تغذیه منطقی (Vss) را از منبع تغذیه موتور (Vs) تأمین می کند.
در این حالت، ترمینال ورودی 5 ولت به عنوان پین خروجی عمل می کند و 5 ولتِ 0٫5 آمپری را تحویل می دهد. می توان از این رگولاتور برای تغذیه آردوینو یا مدارهای دیگری که به منبع تغذیه 5 ولت نیاز دارند، استفاده کرد.
هنگامی که جامپر را برداریم، رگولاتور 5 ولت از کار می افتد و باید 5 ولت را از طریق ترمینال ورودی 5 ولت جداگانه تأمین کنیم.
اخطار:
اگر منبع تغذیه موتور کمتر از 12 ولت باشد، می توانید جامپر را در در مدار قرار دهید. اگر ولتاژ بیش از 12 ولت است، باید جامپر را بردارید تا از خراب شدن رگولاتور 5 ولت جلوگیری کنید.
همچنین، دقت کنید زمانی که جامپر در جای خود قرار دارد، منبع تغذیه موتور و منبع تغذیه 5 ولت را جداگانه تأمین نکنید.
افت ولتاژ ماژول L298N:
اگر 12 ولت را به ترمینال منبع تغذیه موتور وصل کنیم، موتورها ولتاژ حدود 10 ولت دریافت می کنند. این بدین معناست که یک موتور 12 ولت DC هرگز با حداکثر سرعت خود نخواهد چرخید.
برای خارج شدن حداکثر سرعت از موتور، منبع تغذیه موتور باید کمی ولتاژ بالاتر (2 ولت) از ولتاژ واقعی موتور باشد.
با توجه به افت ولتاژ 2 ولت، اگر از موتورهای 5 ولت استفاده می کنید، باید 7 ولت در ترمینال منبع تغذیه موتور تأمین کنید. اگر موتور 12 ولت دارید، ولتاژ تغذیه موتور شما باید 14 ولت باشد.
پین های خروجی ماژول L298:
کانال های خروجی درایور موتور L298N برای موتور A و B با دو پین 3٫5 میلیمتری به لبه ماژول متصل می شوند.
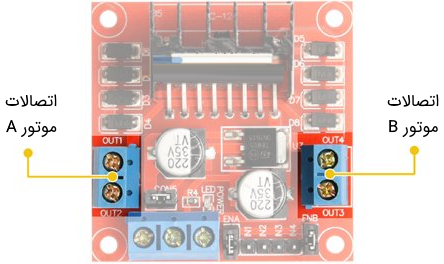
می توانید دو موتور DC با ولتاژ بین 5 تا 35 ولت را به این ترمینال ها متصل کنید. هر کانال روی ماژول می تواند حداکثر 2A به موتور DC تحویل دهد. با این حال، میزان جریان تحویل داده شده به موتور به منبع تغذیه سیستم بستگی دارد.
پین های کنترل ماژول L298:
برای هریک از کانال های L298N، دو نوع پین کنترل وجود دارد که به ما امکان کنترل همزمان سرعت و چرخش موتورهای DC را می دهد. پین های کنترلِ جهت و پین های کنترلِ سرعت.
پین های کنترل جهت در شکل زیر مشخص شده اند.
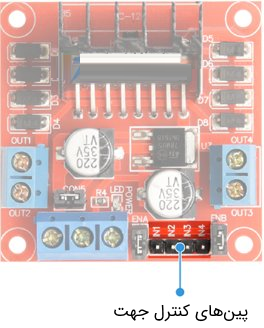
با استفاده از پین های کنترل جهت، می توانیم موتور را در دو جهت بچرخانیم. این پین ها در واقع سوئیچ های مدار پل اچ داخل آی سی L298N را کنترل می کنند.
ماژول L298 دارای دو پایه کنترلِ جهت برای هر کانال است. پایه های IN1 و IN2 جهت چرخش موتور A را کنترل می کنند، در حالی که IN3 و IN4 موتور B را کنترل می کنند.
جهت چرخش یک موتور را می توان با اعمالِ منطقِ HIGH (5 ولت) یا منطقِ LOW (زمین) به این ورودی ها کنترل کرد. جدول زیر نحوه انجام این کار را نشان می دهد.

پین های کنترل سرعت در شکل زیر مشخص شده اند.
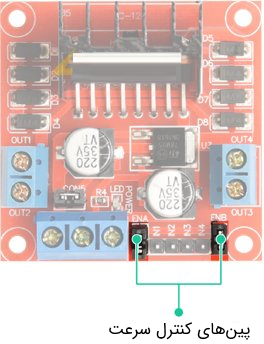
پین های کنترل سرعت، یعنی ENA و ENB، برای روشن یا خاموش کردن موتورها و کنترل سرعت آن ها استفاده می شوند.
با اعمال HIGH، این پایه ها موتور را می چرخانند و اعمال LOW باعث متوقف شدن آن ها می شود، اما با PWM می توانیم سرعت موتورها را کنترل کنیم.
معمولاً جامپر در جای خود روی ماژول قرار دارد. در این صورت، موتور فعال است و با حداکثر سرعت می چرخد. اگر بخواهیم سرعت موتورها را به صورت برنامه ریزی شده کنترل کنیم، باید جامپر را برداشته و به PWM آردوینو را به آن متصل کنیم.











