تعریف مدار منطقی در صنعت برق:
یک مدار منطقی از دو مقدار متفاوت از یک کمیت فیزیکی، معمولاً ولتاژ، برای نشان دادن مقادیر بولی درست (یا 1) و نادرست (یا 0) استفاده می کند.

مدار منطقی ورودی یا ورودی هایی دارد و دارای یک یا چند خروجی است که حداقل تا حدی به ورودی آن ها بستگی دارد.
در نمودارهای مدار منطقی، اتصالات خروجی یک مدار به ورودی مدار دیگر اغلب با نوک پیکان در انتهای ورودی نشان داده می شود.
از نظر عملکردی، مدار منطقی بسیار شبیه توابع یا روش های برنامه نویسی است. ورودی آن مشابه پارامترهای تابع و خروجی های آن مشابه مقادیر برگشتی است. با این حال، یک مدار منطقی می تواند چندین خروجی داشته باشد.
دو نوع اصلی مدار منطقی وجود دارد: مدار ترکیبی و مدار حالت. مدارهای ترکیبی مانند یک تابع ساده عمل می کنند.
خروجی مدارهای ترکیبی فقط به مقادیر فعلی ورودی آن ها بستگی دارد. خروجی مدارهای حالت تنها به ورودی های آن بستگی ندارد، بلکه به تاریخچه گذشته ورودی های آن نیز بستگی دارد. به عبارت دیگر، مدار دارای حافظه است. این دو نوع مدار با هم کار می کنند تا «مسیرداده» (Datapath) پردازنده را تشکیل دهند.
جبر بولی و گیت های منطقی:
جبر بولی اساس کل منطق رایانه ای است. جبر بولی که در اصل توسط جورج بول، ریاضیدان انگلیسی (1864-1815)، ارائه شد، گزاره هایی را توصیف می کند که نتایج آن ها درست یا نادرست است.
در کار با رایانه، عبارات درست و نادرست با حالت خروجی یک مدار الکترونیکی نشان داده می شود که این حالت می تواند 1 (درست) یا 0 (نادرست) باشد.
ما این تغییرات منطقی را به عنوان سطوح ولتاژ درک می کنیم. یعنی وقتی قرار است سطح منطقی نشان دهنده 1 باشد، ولتاژ خروجی به طور معمول 5 ولت (یا ولتاژ دیگری) اندازه گیری می شود. برعکس، منطق 0 با صفر ولت نشان داده می شود.
بنابراین، منطق 1 پنج ولت و منطق 0 صفر ولت است. البته ذکر این نکته نیز ضروری است که بگویم که ولتاژهای غیر از پنج ولت نیز می توانند منطق 1 را نشان دهند و این عدد به مدار و نوع طراحی سیستم بستگی دارد.
عملگرهای اصلی مدار منطقی OR، AND و NOT هستند. AND ضرب دو گزاره است. یعنی اگر هر دو گزاره درست باشند، این گزاره درست است. اگر هر یک از گزاره ها نادرست باشد، این عبارت نادرست است.
OR مجموع گزاره ها است و اگر هریک از گزاره ها درست باشند یا هر دو درست باشند، این گزاره درست است. NOT نیز معکوس یا مکمل یک عبارت است. اگر عبارت درست باشد، مکمل آن نادرست است و بالعکس.
معادلات بولی به صورت جبری جدول زیر بیان می شوند.

تابع معکوس یک عملگر منطقی نیز مهم است، زیرا می توان از آن برای ساده کردن توابع پیچیده استفاده کرد و گاهی تنها راه رسیدن به جواب است. به عنوان مثال، حل معادله زیر تقریباً غیرممکن است:
x OR y, but NOT x AND y
شکل 1 تراشه های منطقی را که در مدار منطقی استفاده می کنیم و شکل 2 ساختارهای اولیه آن ها را نشان می دهد.

شکل 1: تمام تراشه های منطقی که برای ساخت هر پروژه دیجیتالی TTL یا CMOS نیاز است.
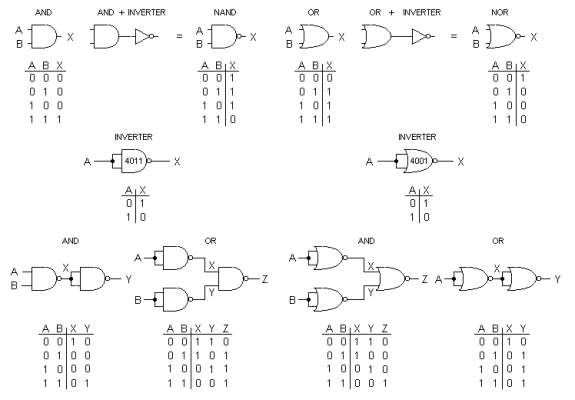
شکل 2: بلوک های باینری پایه (AND، OR و NOT)
گیت های منطقی اولیه بر اساس فناوری RTL (منطق مقاومت و ترانزیستور) ساخته شده بود، که تحت تأثیر نویز قرار می گرفت و به طرز آشکاری آزاردهنده و کاملاً کند بود.
تکنیک های ساخت RTL آن زمان نیز انواع گیت را به عملکردهای ساده تر AND، OR و NOT محدود کرد. با ظهور TTL (منطق ترانزیستور-ترانزیستور) طرح های پیچیده تری با موفقیت ساخته شد.
این پیشرفت ها شامل چندین ورودی فراتر از چهار گزاره، تریگر لبه پایدار و افزایش گنجایش خروجی بود. اما هیچ کدام مهم تر از تغییر پارادایم از منطق مثبت (OR/AND) به منطق منفی (NAND/NOR) نبود (شکل 3).
منطق منفی بسیاری از معادلات بولی را ساده می کند، که منجر به کاهش تعداد گیت ها می شود. این امر سبب می شود محاسبات منطقی بسیار پیچیده مانند میکروکنترلرهای تعبیه شده و پردازنده ها به راحتی انجام شود.
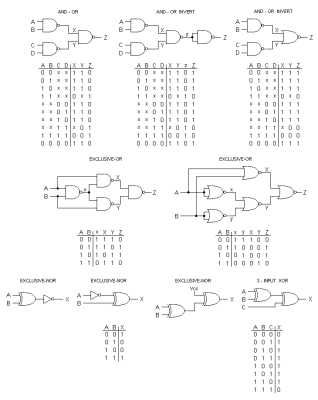
گیت های AND-OR و XOR
درک منطق منفی کار سختی نیست، اما برای پیاده سازی مؤثر آن به دقت بیشتری نیاز دارد. دلیل تأکید بر منطق منفی و خوشه بندی انواع گیت ها کاهش تعداد آی سی است.
بیشتر آی سی های منطقی حاوی دو یا چند گیت یکسان هستند، اگر ندانید چگونه آن ها را برای انجام عملیات مختلف استفاده کنید، بسیاری از آن ها ممکن است بدون استفاده بمانند.
به عنوان مثال، یک گیت دروازه NAND یا NOR بدون استفاده می تواند به راحتی جایگزین NOT شود، که احتمالاً می تواند IC اضافی را حذف کرده و محصول را کم هزینه تر و قابل اطمینان تر کند.











